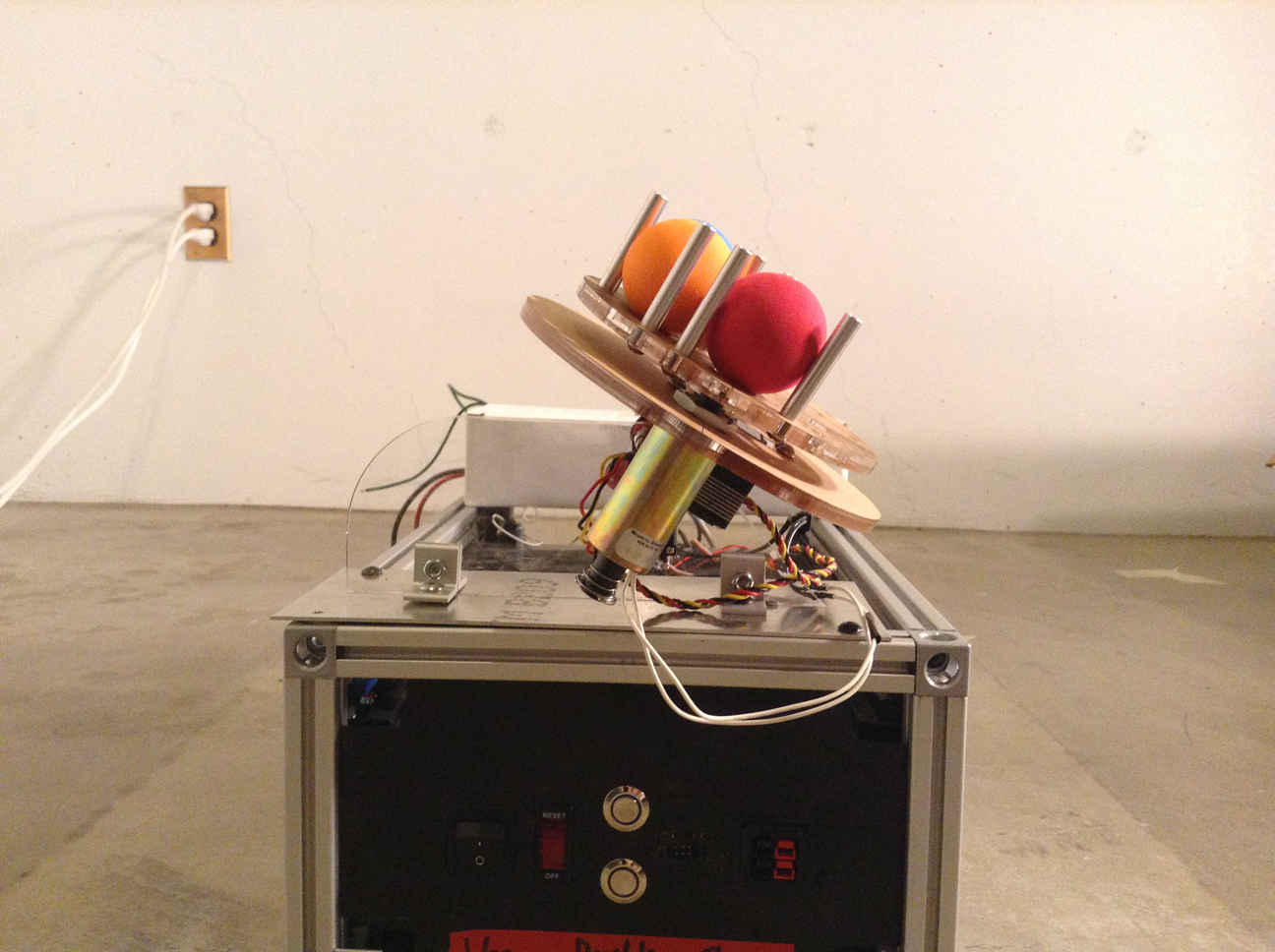
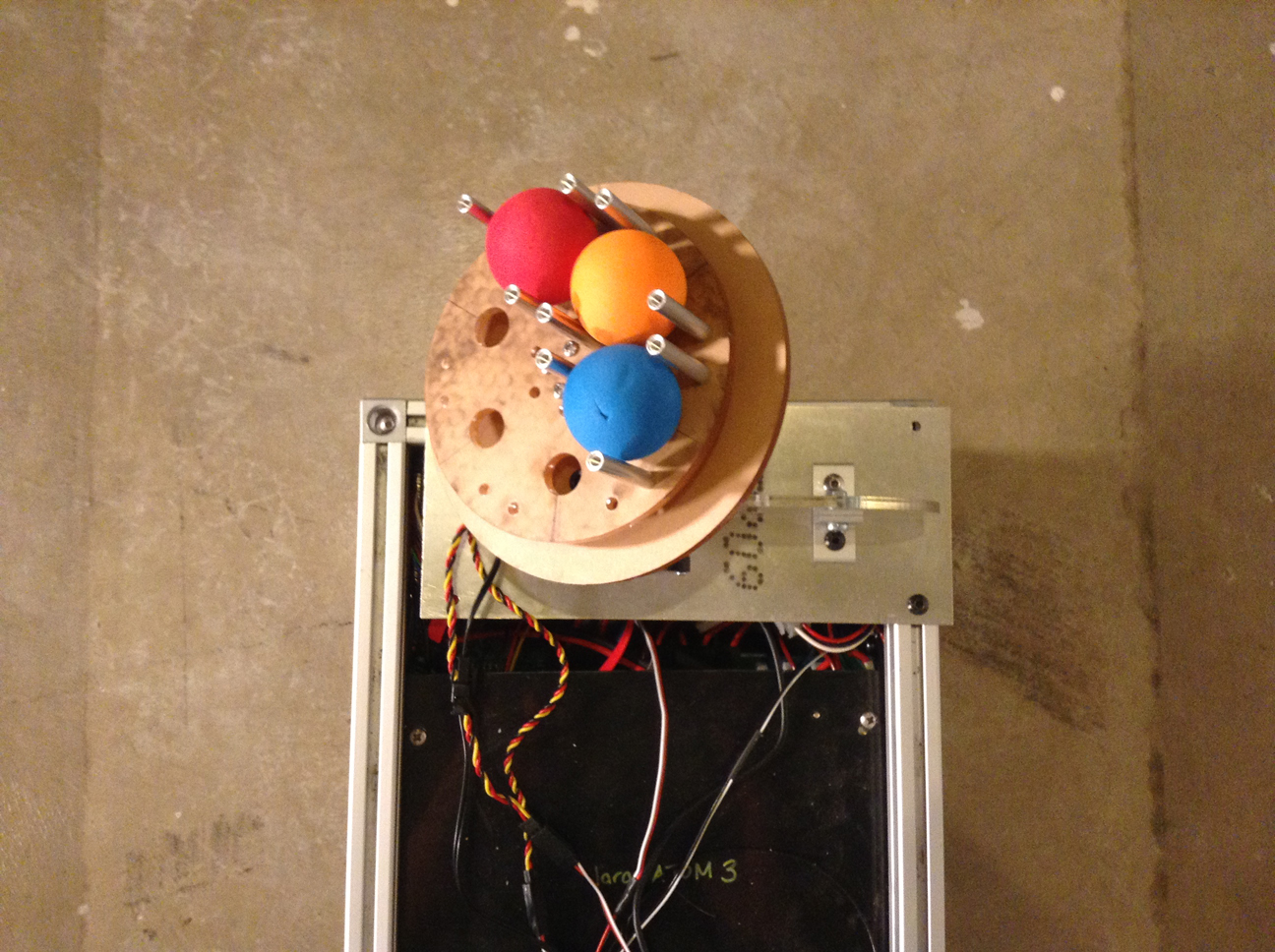
The Mod Bot was developed in the Cornell Cup Lab as a holonomic modular robotics platform with overhead camera localization and a model-predictive controller for the development of new autonomous systems by various research teams. One particular goal of this system was to enable the creation of multiple robots with the ability to catch and throw racquetballs to play a game of catch.
I joined the team in the Spring of 2012 and worked on various aspects of the robot. For one of the components of this system, I designed, built and tested a racquetball launcher to be incorporated into the juggling system. The design was developed in Solid Works, was built using a laser cutter and a machine shop, and was tested at our lab.